SpatialLMは、3D点群データをもとに、壁・ドア・窓・家具などを整理しながら室内空間を理解できる3D大規模言語モデルです。単眼RGB動画から作った点群だけでなく、RGBD画像やLiDARによる点群にも対応し、空間情報を3Dレイアウトや2Dフロアプラン、IFC形式へまとめられる点が特徴です。
室内の様子をよりわかりやすく扱える技術として、ロボットや建築分野での活用も期待されているため、本プロジェクトの詳細を考察します。
SpatialLMが注目される背景とは
最近は、ロボットや建築、屋内ナビゲーションなどの分野で、空間をきちんと理解できるAIへの関心が高まっています。これまでのAIは、画像や文章を扱う力が大きく伸びてきましたが、実際の部屋の形や、その中にある物の位置関係まで立体的に理解することは簡単ではありませんでした。SpatialLMは、そうした課題に向き合うために作られたモデルです。3D点群データをもとに、壁やドア、窓、家具などを整理された形で捉えられるため、ただ形を見るだけでなく、部屋全体をわかりやすい情報としてまとめやすい点が特徴です。また、単眼RGB動画、RGBD画像、LiDARなど複数の入力方法に対応しているため、使える場面が広いことも注目されています。3D空間の理解を、研究だけでなく実際の利用へ近づける技術として期待されています。
参考ページ:SpatialLM「Training Large Language Models for Structured Indoor Modeling」
SpatialLMは何ができるのか
SpatialLMの特徴をやさしく言うと、3Dの空間情報を、人が使いやすい形にまとめられることです。これまで3D点群は専門的なデータとして扱われることが多く、見ただけではわかりにくい面がありました。SpatialLMは、その点群を壁や窓、家具など意味のある形に整理し、さらに別の形でも使えるようにしています。ここでは、SpatialLMができることを3つの視点から見ていきます。
室内空間をわかりやすく整理できる
SpatialLMは、3D点群データから、ただ物の位置を見つけるだけではなく、部屋そのものを整理して理解できる点が大きな特徴です。公式ページや論文では、壁、ドア、窓といった建物の要素に加えて、家具などの位置や向きも出力できることが示されています。これにより、部屋の中に何があるかだけでなく、それぞれがどのように置かれているかもつかみやすくなります。3D空間を単なる点の集まりとして見るのではなく、意味のある室内情報としてまとめられることが、SpatialLMの大きな強みです。建物の確認や空間の把握などで使いやすい形へ近づけられる点は、実用面でも大きな価値があると考えられます。
いろいろな入力方法に対応している
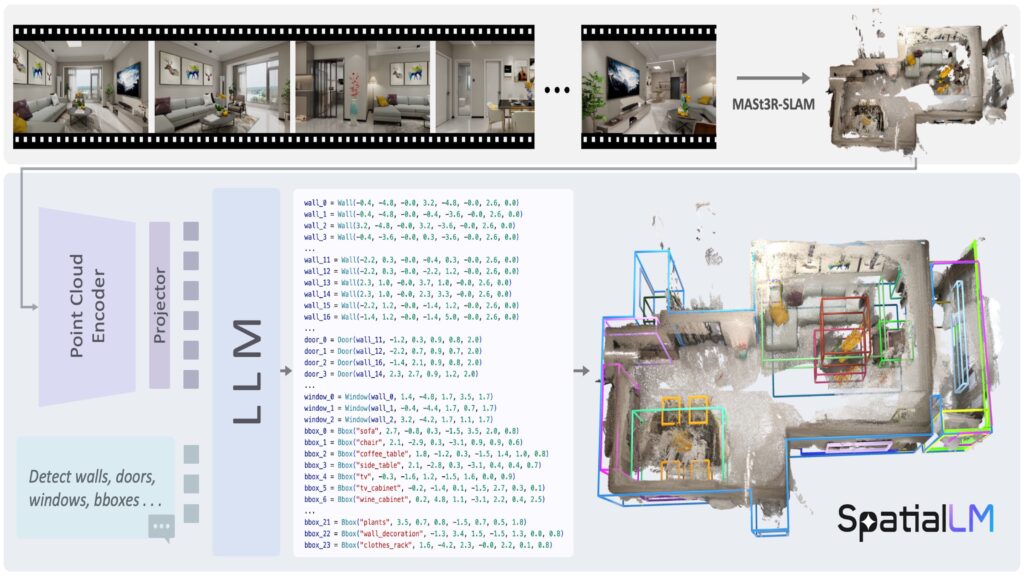
SpatialLMは、特別な機器だけに頼らず、いくつかの方法で得た点群を扱えるように作られています。公式ページでは、単眼RGB動画、RGBD画像、LiDARによる点群に対応できることが説明されています。たとえばRGB動画の場合は、まずMASt3R-SLAMで3D点群を作り、そのあとでSpatialLMが空間を整理していく流れです。この仕組みによって、高価な計測設備がなくても室内空間の理解へつなげやすくなります。現場で使うことを考えると、入力方法の選択肢が多いことは大きな強みです。利用する環境に合わせて取り込み方を選びやすいため、研究だけでなく実務での活用も考えやすいモデルです。
結果をさまざまな形で活用しやすい
SpatialLMのもうひとつの強みは、読み取った空間情報をさまざまな形で使えることです。公式ページでは、結果を3Dの物体の枠情報だけでなく、2DフロアプランやIFC形式などでも表せると示されています。これは、AIが空間を理解して終わりではなく、その結果を建築や設計、設備管理などの仕事にもつなげやすいことを意味します。とくにIFCは建築分野で使われる代表的な形式のひとつなので、今ある仕組みと組み合わせやすい可能性があります。SpatialLMは、3D空間の理解と実際の業務をつなぐ役割も期待できる技術です。
SpatialLMはどのような仕組みで空間を理解するのか
SpatialLMを理解するうえで大切なのは、3Dデータをそのまま見ているだけのモデルではないという点です。公式情報では、点群を整理して特徴を取り出す部分と、そこから空間の情報をまとめていくLLMを組み合わせた作りが示されています。さらに学習には、大規模で質の高い合成データセットが使われています。ここでは、そのしくみを3つに分けて見ていきます。
点の集まりをわかりやすい情報へ変えている
SpatialLMでは、まず入力された3D点群を処理して、扱いやすい特徴へまとめます。3D点群は情報量が多く、そのままだとばらつきも大きいため、モデルが理解しやすい形に整えることが大切です。SpatialLMは、空間の形や位置関係を保ちながら要点を取り出し、そのあとでLLMが扱いやすい形へつなげています。この流れによって、細かな点の集まりだった情報が、壁やドア、家具の配置といった、意味のある空間情報として見やすくなります。3D処理とLLMをうまくつないでいる点が、このモデルの特徴です。
LLMが空間全体をまとめて捉えている
SpatialLMの中心には、LLMが空間情報をまとめて表現し、それをもとに部屋の構造を表す流れがあります。一般的にLLMというと文章を作るイメージが強いですが、この研究では空間を理解する役割にも使われています。公式ページでは、LLMが作ったシーンコードをもとに、3Dの構造レイアウトへ変換する流れが示されています。これは、物を一つずつ見つけるだけではなく、部屋全体を見ながら整理していく考え方です。そのため、個別の物だけでなく、空間全体のつながりもつかみやすい仕組みになっていると考えられます。
現実に近い学習データで学んでいる
論文では、SpatialLMの学習用として、12,328の屋内シーンと54,778の部屋を含む大規模な合成データセットを作ったと説明されています。公式ページでも、壁や物の配置が現実に近く、自然な形になるように整えたフォトリアルなデータセットで学習していると紹介されています。室内空間では、物の位置や壁との関係が少し不自然になるだけでも違和感が出やすいため、学習データの質はとても重要です。SpatialLMは、数を増やすだけでなく、実際の部屋らしさを意識したデータで学んでいる点が強みだといえます。こうした土台があるからこそ、さまざまな入力から整理された空間情報を出しやすくなっていると考えられます。
SpatialLMが実用面で期待される理由
SpatialLMが注目される理由は、3D空間を理解するだけでなく、その結果を実際の現場で使いやすい形にしやすい点にあります。公式情報では、入力として単眼RGB動画、RGBD画像、LiDARに対応し、出力も3Dレイアウト、2Dフロアプラン、IFC形式まで広く扱えると示されています。また論文では、公開ベンチマークでレイアウト推定において最先端水準の結果を示し、3D物体検出でも競争力のある結果を出したと説明されています。
こうしたことから、SpatialLMは研究だけで終わる技術ではなく、実際の利用も見すえたモデルとして期待されています。とくに、動画から作った点群をもとに、空間を整理した形までまとめられる流れは、現場での使いやすさにつながる可能性があります。建築や設備管理、ロボット分野などで、空間をわかりやすい情報として扱いたい場面では、今後さらに注目されそうです。
今後の展望
SpatialLMは、3D点群を壁やドア、窓、家具といった整理された情報へ変えられるだけでなく、単眼RGB動画、RGBD画像、LiDARなど幅広い入力に対応し、さらに2DフロアプランやIFC形式にもつなげられる点が強みです。こうした特徴をふまえると、今後は単なる3D認識モデルとしてではなく、人やシステムの判断を助ける空間理解の土台として役割を広げていく可能性があります。ここからは、SpatialLMならではの今後の広がりを3つの視点から考えていきます。
空間の様子を伝えられるAIアシスタントへの広がり
SpatialLMの今後を考えるうえで注目したいのが、空間を理解するだけでなく、その内容を人にわかりやすく伝えるAIアシスタントとしての広がりです。公式ページでは、将来の拡張先として、人とやり取りする知的アシスタントや、複雑な環境で動くロボットへの応用可能性が示されています。ここから考えられるのは、将来的にSpatialLMが部屋の様子を読み取り、「どこが通りやすいか」「家具はどう置かれているか」「ドアや窓はどこにあるか」といった内容を、わかりやすい形で伝える土台になる可能性です。3D点群はそのままだと専門家以外にはわかりにくい情報ですが、整理された空間情報として説明できれば、設備点検や建物管理、室内案内、作業前の確認などにも役立てやすくなります。将来的には、3Dを読むだけのモデルから、空間を理解して伝える支援役へ広がっていく可能性があります。ただし、これは公式が示している将来の方向性をもとにした考察であり、実際の利用には安全性や精度の確認が必要です。
建築や設備管理で使いやすい土台への広がり
SpatialLMのもうひとつの可能性は、建築や設備管理の現場で使いやすい情報の土台になりうる点です。公式ページでは、出力結果を3Dの枠情報だけでなく、2DフロアプランやIFCといった業界で使われる形式にもつなげられると示されています。これは、AIが空間を理解して終わるのではなく、その結果を設計や施工、維持管理などの流れにのせやすいことを意味します。たとえば建物の現状確認や改修前の把握では、現場を撮影して得た点群から部屋の構造を整理し、それを既存の建築情報に近い形で扱えれば、確認や共有の手間を減らせる可能性があります。また、壁やドア、家具の位置が整理されていれば、設備点検や動線確認にも役立てやすくなります。もちろん、そのまま実務データとして使うには精度や責任範囲の整理が必要ですが、SpatialLMは3D理解の結果を現場の仕組みへつなぐ方向を意識した技術だと考えられます。
ロボットや自律移動を支える空間理解への広がり
SpatialLMの今後として、ロボットや自律移動システムを支える空間理解の土台になる可能性もあります。公式ページでは、応用先としてロボットや自律移動、複雑な3D空間の分析が挙げられています。論文でも、LLMに空間理解の力を持たせることで、ロボット分野や拡張現実への広がりが期待されていることが示されています。たとえばロボットが屋内を動くときには、障害物があるかどうかだけでなく、壁やドアの位置、物の向き、通路の広さなどを整理して理解することが重要です。SpatialLMは、こうした情報を意味のある形でまとめられるため、今後は移動ルートの検討や作業支援、屋内巡回、案内ロボットなどにもつながる可能性があります。さらに、単眼RGB動画から作った点群にも対応できる点は、導入のしやすさという面でも強みです。実際の移動には安全制御など別の技術も必要ですが、空間を整理して理解する土台としては大きな可能性があります。